|
 |
|
|
|
|
 |
 |
 |
 |
Visual
Upwind Flight Control |
 |
 |
 |
 |
 |
 |
 |
 |
Recent experimental results demonstrate that flies posses a robust
tendency to orient towards the frontally-centered focus of the
visual motion field that typically occurs during upwind flight.
We have developed a closed loop flight model (Figure 1), with
a control algorithm based on feedback of the location of the visual
focus of contraction, which is affected by changes in wind direction.
We have demonstrated the feasibility of visually guided upwind
orientation with a model derived from current understanding of
the biomechanics and sensorimotor computation of insects. The
matched filter approach used to model the visual system computations
compares extremely well with open-loop experimental data. To test
the ability of the closed loop system to orient the fly in the
upwind direction, we presented 'step inputs' to the control system,
where the fly was given an initial velocity and orientation and
the wind was set at a fixed magnitude and
Direction (Figure 2). It is clear from the step responses that
the tracking works, in the sense that the steady state error is
driven to zero, resulting in upwind orientation. Closed loop simulations
show stable upwind orientation behavior over the range of behaviorally-relevant
wind speeds and sensitivity only to very low frequency disturbances.
In future work we expect to extend this simulation to three dimensions
and six degrees of freedom, and investigate vision algorithms
that take advantage of global optic flow cues. Also of immediate
interest is the velocity control problem associated with transition
from backwards to forward flight in the upwind direction.
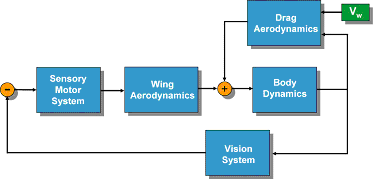
1 Closed loop model of upwind flight with wind disturbances.
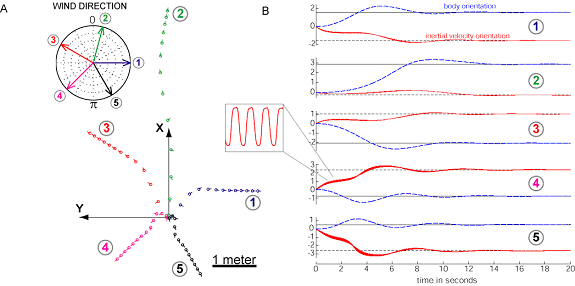
2 Closed loop simulation results show the robustness of the tracking
behavior. (A) Simulated 20 second flight trajectories, with fly
positions plotted every 1.5 seconds. (B) Step responses in wind
direction, showing zero steady-state error.
return to research index
|