|
|
|
|
|
 |
 |
 |
 |
Visual
Tethered Flight Simulators (Fly-O-Vision) |
 |
 |
 |
 |
 |
 |
 |
 |
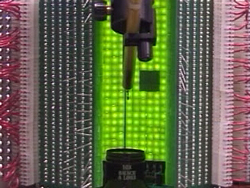
To study flight behavior in a more controlled way than is possible
in free flight, we have constructed a series of tethered flight
simulators, based on the pioneering work of Werner Reichardt,
Karl Götz, and other previous researchers. With Fly-O-Vision,
the animal is carefully tethered to a fine tungsten wire and placed
within a cylindrical array of computer-controlled LEDs. We measure
the output of the fly's flight system using either a wingbeat
analyzer (which tracks in real time the shadows of the two wings
cast by an infrared diode), or a laser-based force and torque
sensors (which measure whole-body aerodynamic forces generated
by the fly). The instruments are used in two basic configurations,
open-loop and closed-loop. In open-loop mode, we present the animal
with a visual stimulus and measure its behavioral response. In
closed-loop mode, the fly itself can alter its visual environment
through changes in wing motion or flight forces. For example,
the fly can rotate the visual display to the left, by generating
an aerodynamic torque that would rotate it to the left..
Movies
return to research index
|